
基于MDCO4高精度数字电容传感芯片的扫地机器人水箱液位检测设计方案
随着科技进步和社会发展,扫地机器人逐渐走入千家万户,代替日常家务。目前,扫地机器人除了扫地外,大部分结合了洗地机的拖地功能,通过水箱湿润抹布,达到拖地目的。但是,绝大部分扫地机器人水箱并没有水量检测功能,无法及时反馈到用户,给使用带来极大不便,实用性受到限制。
本设计方案提供了一种利用敏源传感高精度数字电容传感芯片MDCO4检测扫地机器人水箱液位变化,并成功将液位分成不少于4个档位的检测原型方案,为扫地机器人水箱液位检测提供一种新方式。
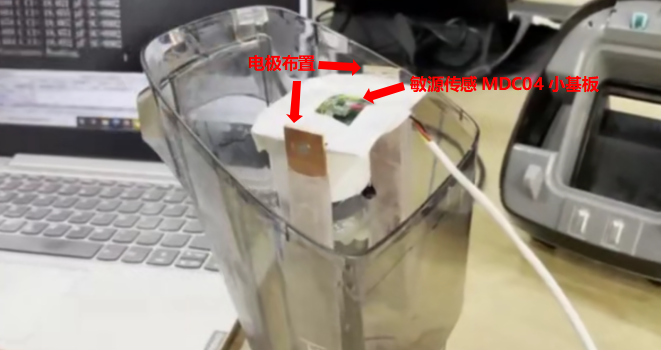
方案检测原理是通过一对电极,随着水箱液位的电容变化,来检测并区分水箱的液位变化。方案主要使用到敏源传感MESK开发板和MDC04小基板。MDCO4是敏源传感一款4通道测量的高精度电容调理芯片,每个通道可测量电容两极之间的互感电容,该方案仅使用其中的一个通道。具体实验过程见下。
先将接口接到MESK开发板,按复位键,可以检测到4通道的电容变化,实验使用1通道。按ESC键退出,输入指令“$M”,再回车,就可以看到1通道的容值和温度数值。
空载状态下,显示容值在0.76pF左右。

往水箱中加入140毫升的清水,可以看到容值由0.76pF左右变化到5.1pF左右。

晃动水箱,容值在4.8pF~5.0pF间波动。

继续往水箱中加入140ml的清水,容值变为9.1pF左右。

晃动容器,容值在9.0pF附近上下波动。

继续往水箱中加入140ml的清水,容值变为13.3pF左右。

晃动容器,容值变在14pF左右浮动。

继续加入140ml的清水,容值变为17.6pF左右。

此时已经达到水箱的满量程刻度线,晃动容器,容值维持在17pF左右。

整个实验过程中,随着水箱液位变化,测得的电容数据如下表所示。
| 水箱液位/容积(ml) | 容值/pF |
| 空 | 0.76 |
| 140 | 5.1 |
| 280 | 9.1 |
| 420 | 13.3 |
| 560 | 17.6 |
对应数据图如下。

由上图可清楚看到,随着水箱液位的变化,电容值发生明显变化。
利用该方案,还可以对扫地机器人水箱中不同水质的液位进行测量,如污水、清洁水等。
另外,针对扫地机器人水箱不同姿态的液位变化,如正立、前倾、后倾、左倾、右倾等,通过原电极直接延伸加长或电极延长后移等方式,可以消除不同姿态下的水箱液位变化带来的差异。
最终,通过实验得出,利用该方案,通过内插法电极(电极防水)的合理布局,完全可以克服不同水质、不同姿态下的扫地机器人水箱液位变化。而且,通过合理的阈值设计,达到扫地机器人水箱4档液位的明显区分。
更多设计方案详情,欢迎大家咨询:sales@mysentech.com
本设计方案中用到的MDC04简介:
MDC04是敏源传感高集成度的数字模拟混合信号传感集成电路,芯片直接与被测物附近的差分电容极板相连,利用不同物质介电常数的区别,通过放大、数字转换、补偿计算电容的微小变化来实现物质成分的传感。
芯片内部集成高精度的16bit模数转换ADC电路,其电容分辨率为 0.1fF,线性度误差小于0.3%。此外,芯片内置精度 0.5℃的温度传感电路,可用于温度补偿及其他温度传感场景,用于液位检测、食品/土壤等水分含量测量、冰霜检测等应用场景。